I am a Computer Vision Engineer working on learning-based visual perception and 3D understanding.
My work spans 3D reconstruction, pose estimation, multi-view geometry, and
deep learning, including transformer-based vision architectures and vision–language models
for robust visual reasoning.
I build end-to-end vision systems across sensor integration (ROS / ROS2), dataset generation,
calibration, model training and inference, and geometric optimization,
with a focus on scalability, generalization, and
real-world performance.
Core tools for computer vision, perception research, and robotics sensing:
Vision & Learning
Python
PyTorch
TensorFlow
OpenCV
3D Vision & Robotics
ROS
C++
Linux
Unreal
Systems & Tooling
Docker
K8s
Git
GitHub
Projects
Selected work in computer vision and robotics perception.
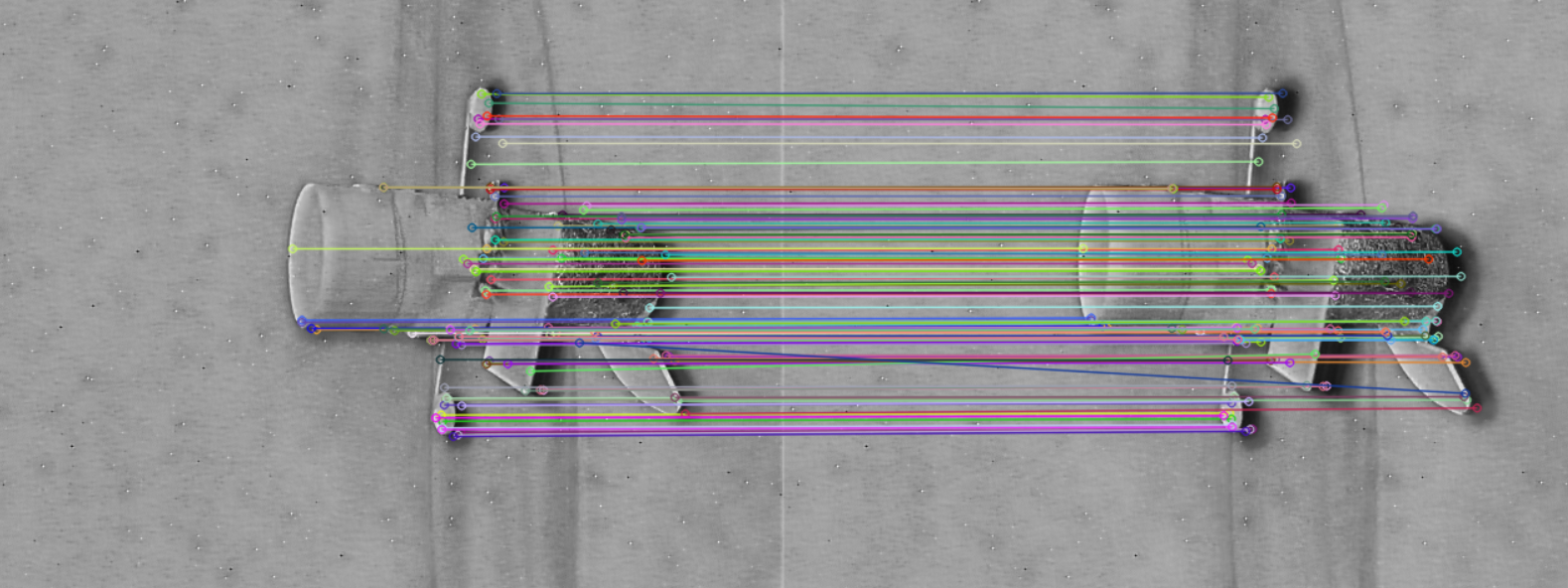
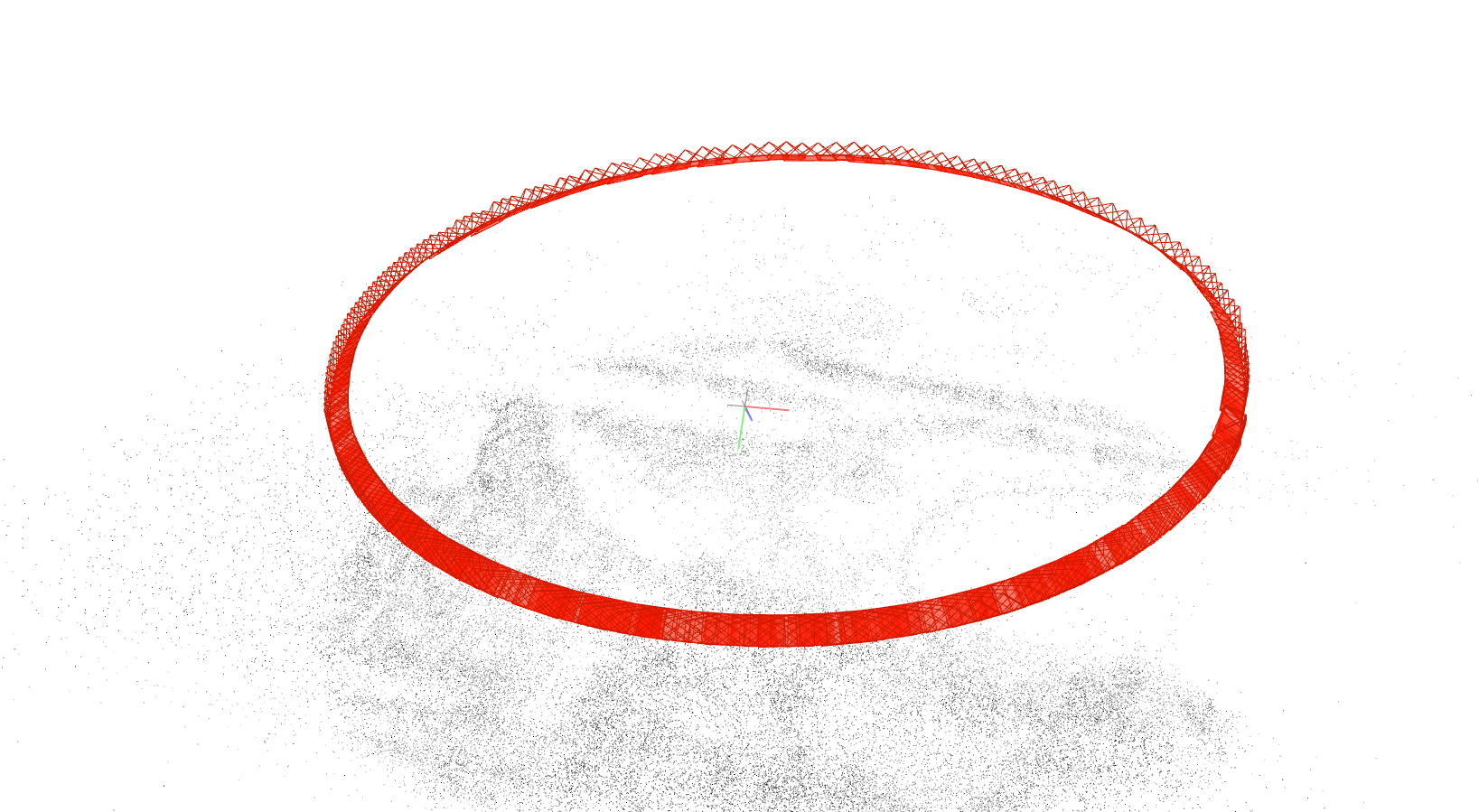
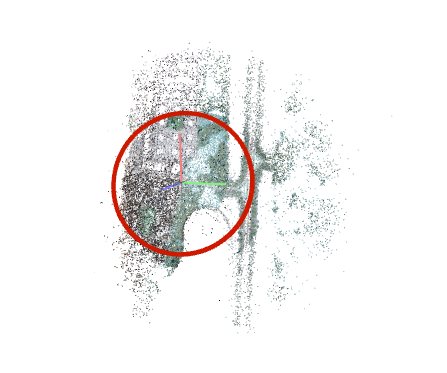
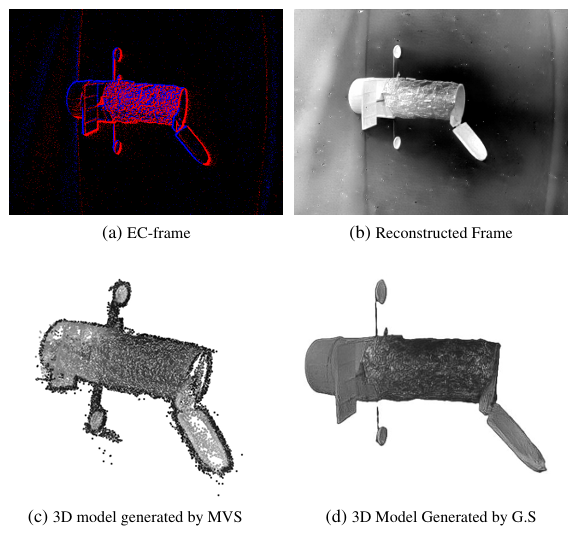
EvSat3D: Event-Based Satellite Pose Estimation & 3D Reconstruction
Developed an event-based perception pipeline for
satellite pose estimation and 3D reconstruction, designed
to operate under extreme space-imaging conditions such as high relative
motion and rapid illumination changes.
Leveraged neuromorphic (event) cameras with
SfM-style geometric optimization to recover accurate
camera pose and 3D structure from asynchronous event data.
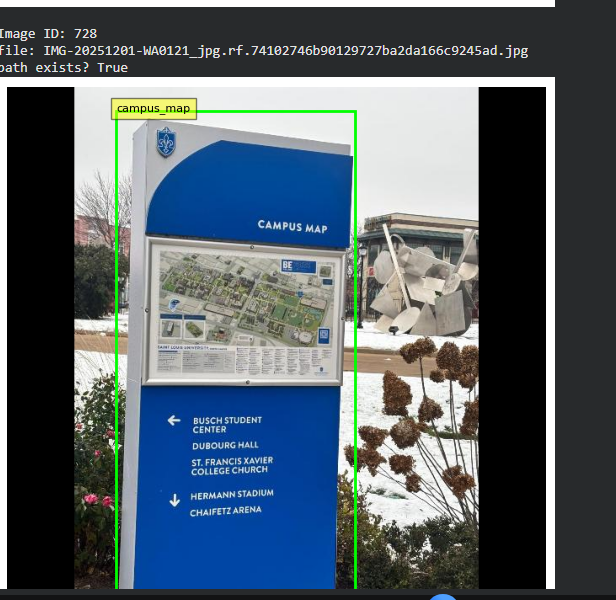
Adapted a state-of-the-art transformer-based object detector
for deployment in a real-world campus environment,
addressing domain shift beyond standard benchmark datasets.
Designed and implemented the full detection pipeline, including
dataset curation, data preprocessing,
model fine-tuning, evaluation, and
benchmarking.
Outcome: Achieved top detection and classification accuracy
among all project teams and demonstrated strong
generalization.
Focus: Transformer models, object detection, PyTorch,
dataset curation, model evaluation
LW-DETR fine-tuning and real-world object detection results
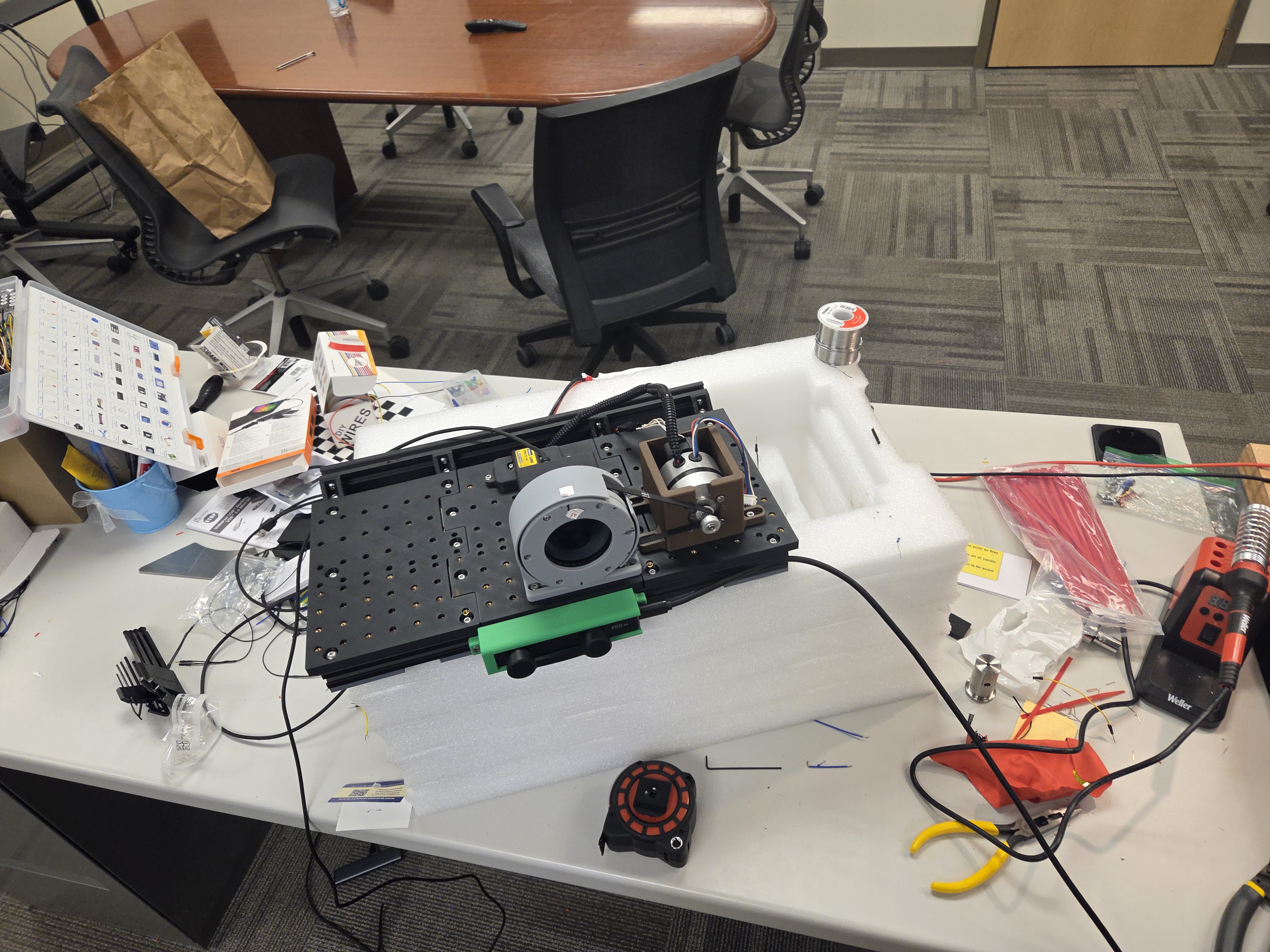
Serial Reader ROS Node for Event Camera Triggering
Built a ROS-based serial interface to synchronize an
Arduino-controlled rotating polarizer with a
Prophesee event camera for condition-driven data capture.
Parses real-time serial data, publishes motor shaft RPM,
and auto-triggers rosbag recording based on thresholds.
Outcome: Reliable, repeatable event-camera recording for experiments.
Focus: ROS, Python, serial communication, synchronization,
real-time systems, event-based vision
ROS serial reader triggering Prophesee recordings
Project Montis — Interactive 3D Digital Twin (UAV, Point Clouds & Gaussian Splatting)
Built an interactive 3D digital twin from UAV imagery using SfM/SLAM pipelines,
producing dense point clouds and photorealistic scene representations.
Used Gaussian Splatting for efficient rendering and smooth viewpoint navigation.
Focus: Point clouds, Gaussian Splatting, 3D reconstruction,
multi-view geometry, UAV perception
Interactive 3D twin with point clouds + splatting
Multi-Sensor Simulation in CARLA (UAV 3D Reconstruction & Pose Estimation)
Built a synthetic dataset by simulating a UAV with multiple sensors in CARLA
for 3D reconstruction and pose estimation.
Designed synchronized RGB + event sensor pipelines, trajectories, and ground-truth pose.
Built a regression pipeline to predict flower petal counts from RGB images
using pretrained CNNs.
Evaluated ResNet50 and VGGNet backbones with
custom regression heads; best performance with ResNet50.
Focus: CNN regression, transfer learning, image counting, PyTorch
Demo placeholder
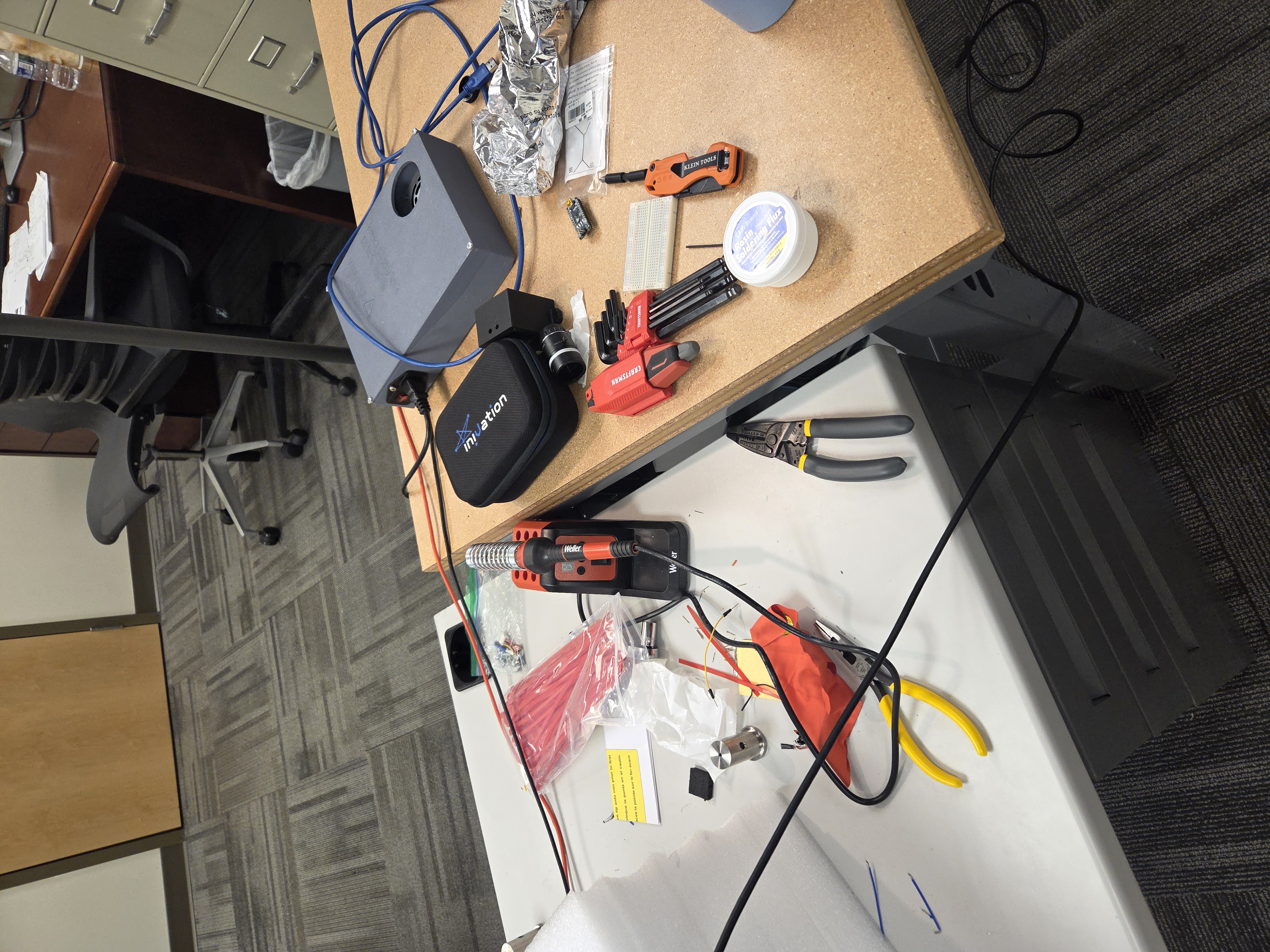
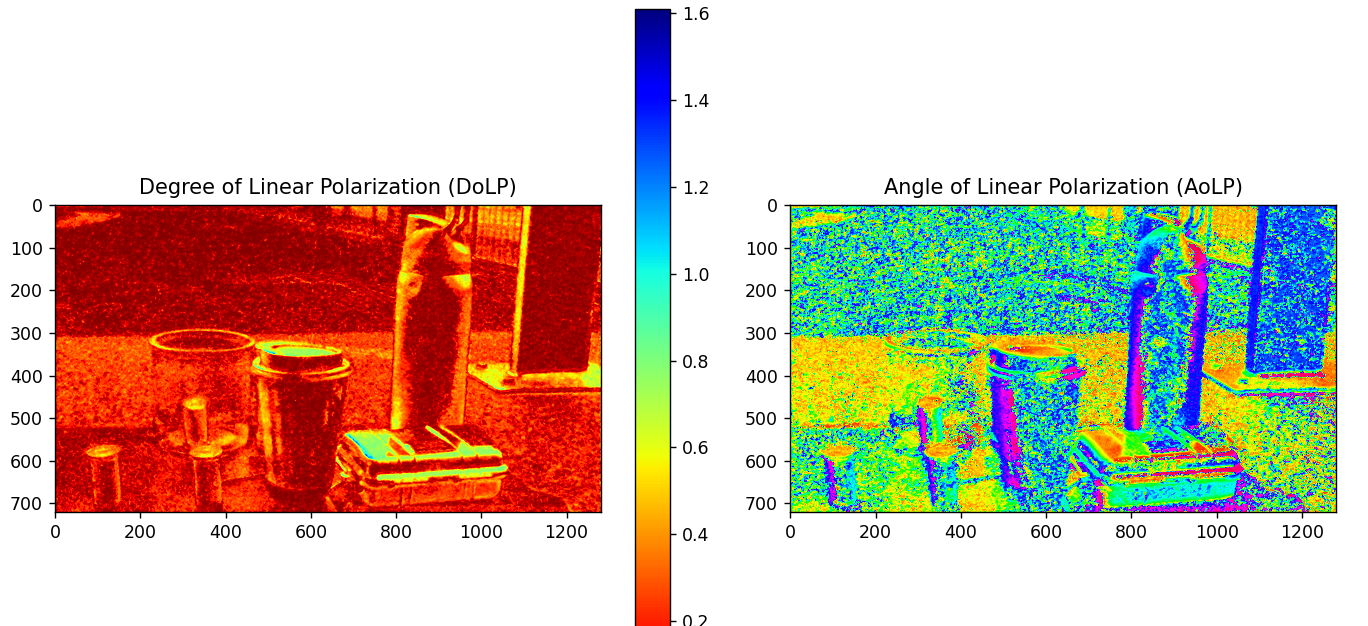
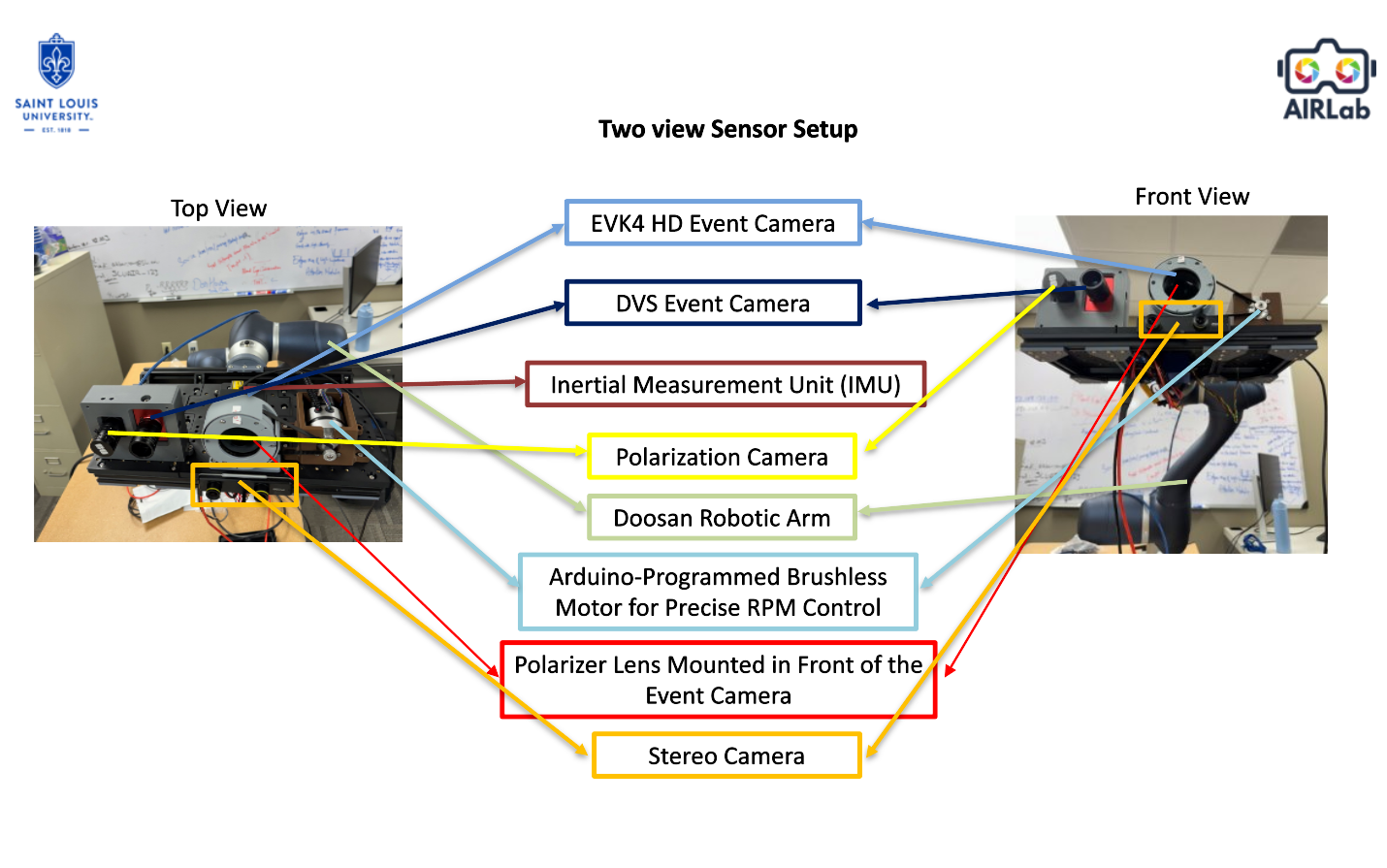
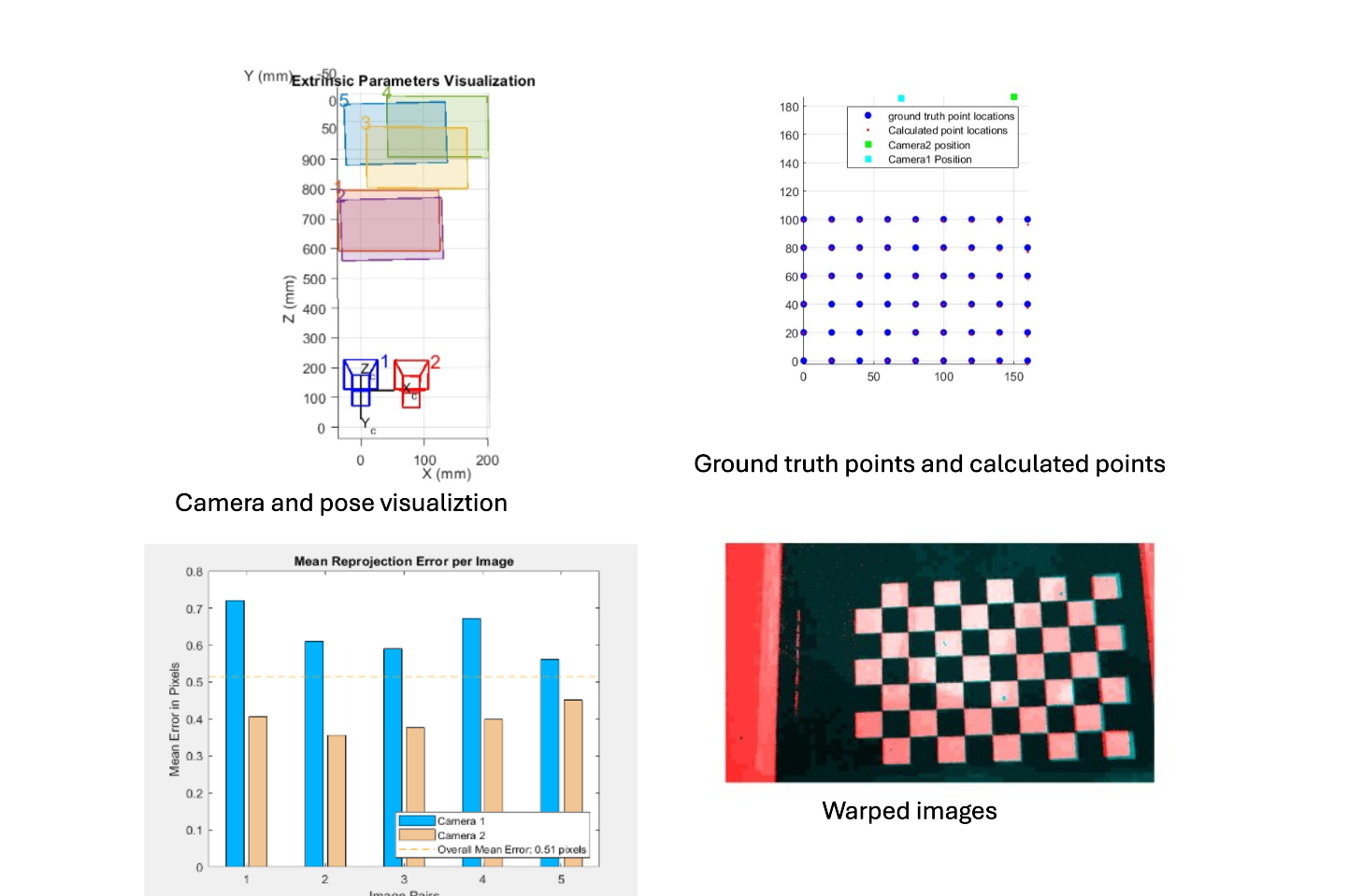
Polarized Event Vision — Event Camera Hand–Eye Calibration System
Developed a novel hand–eye calibration pipeline for event cameras using a
rotating polarized lens mounted in front of an event sensor on a robotic arm.
The system enables robust calibration and event generation from challenging
surfaces by exploiting polarization cues, while synchronizing robot motion
and event streams through ROS-based control and data acquisition.